8.1 Launch Commands Navigation Mode
Make sure that ROS1-ROS2 Bridge, and Localization node are running!Make script executable
cd ~/mikrik_robotics_sdk/scripts/ sudo chmod u+x realsense_collabslam_navigation.sh
Launch it by running
cd ~/mikrik_robotics_sdk/scripts/ ./realsense_collabslam_navigation.sh
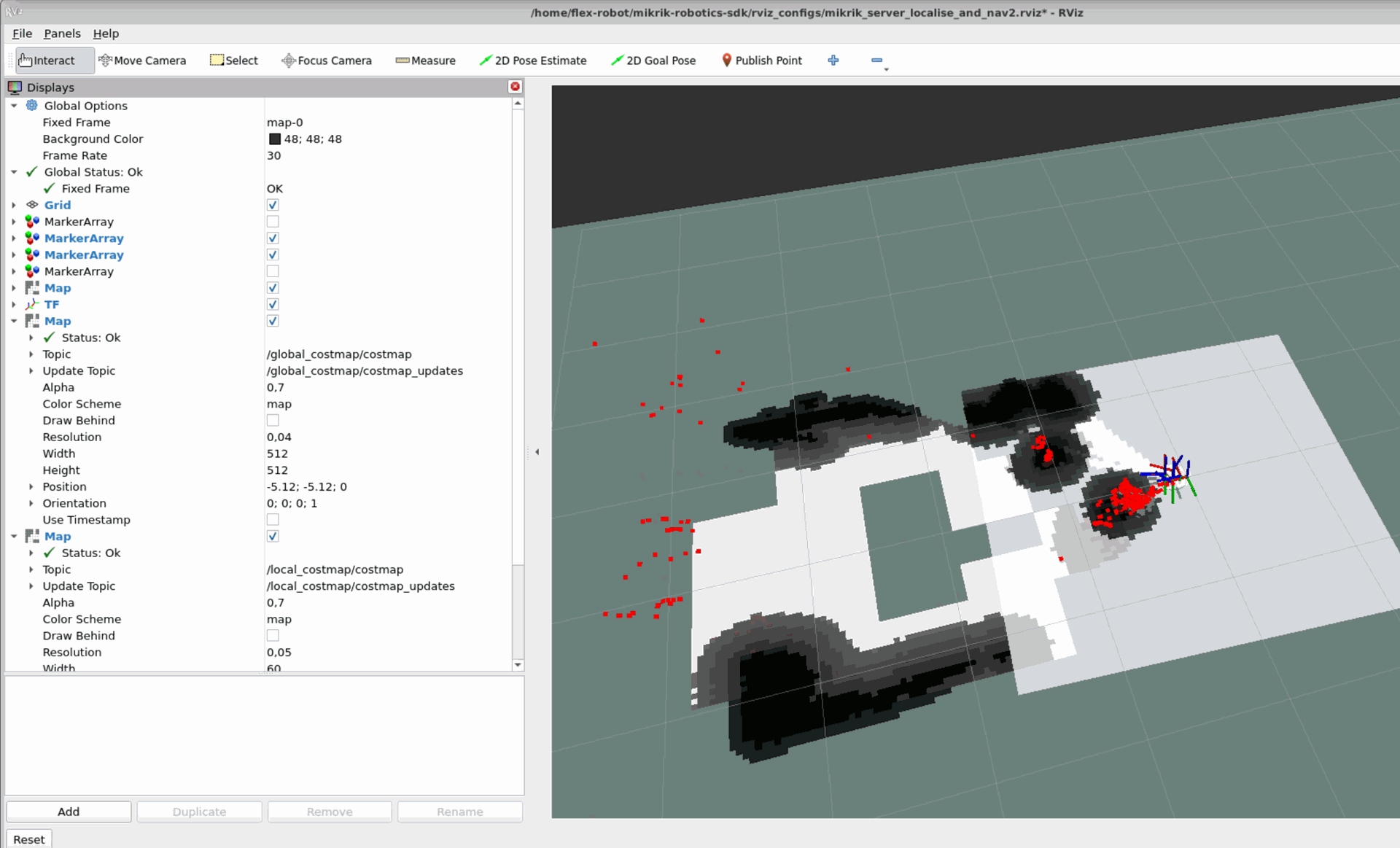
If everything is correct, you will see that localization rviz window got updated with a costmap on it.
Rating
There are no comments for now.
to be the first to leave a comment.